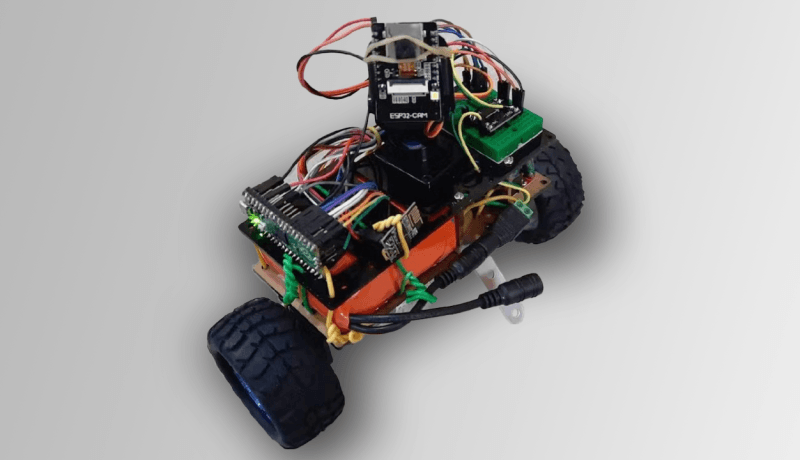
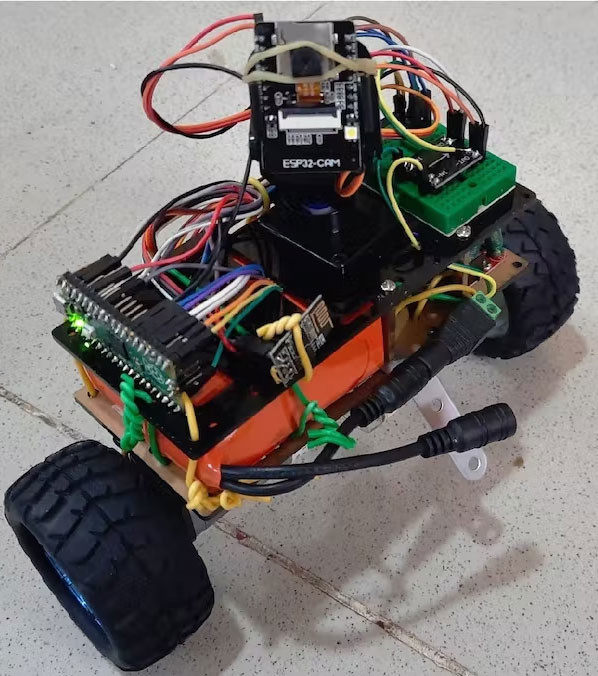
C'est toujours amusant de jouer avec un robot gyropode à deux roues, mais celui-ci est contrôlé par le WIFI, et envoie un flux vidéo en direct depuis son module caméra ESP32.
Voici un excellent projet de aadhuniklabs sur hackster.io qui démontre l'utilisation du contrôle PID (proportionnelle, intégrale, dérivée), et poursuit en ajoutant une télécommande par WIFI et un module caméra ESP32.
Le contrôle PID est essentiel dans de nombreux domaines, principalement dans l'industrie et la robotique : pour gérer n'importe quelle activité autonome, il faut une méthode pour évaluer si nous faisons la bonne action ou pas, afin de pouvoir les corriger en conséquence.
La boucle de rétroaction intégrée au système PID maintient le robot en équilibre. Vous-vous penchez un peu trop en avant ? Avancez légèrement les roues pour rester debout, et vice-versa.
Pour y parvenir, l'auteur utilise une carte fonctionnant en mode double-coeur à 250 MHz. Maintenir le robot en équilibre est une prouesse impressionnante. Voyez plutôt :
Un module caméra ESP32 envoie un flux vidéo au contrôleur hôte (un PC) via WIFI (ESP8266), et vous pouvez ainsi diriger le robot (il fait ainsi plus que seulement rester en équilibre). Est-ce-que vous avez besoin de positionner le robot exactement dans la direction souhaitée pour la vue de la caméra ? Non, le concept du robot inclut également les contrôles de panoramique, inclinaison et zoom, vous permettant de manœuvrer la caméra pendant que le robot est occupé à garder son équilibre.
Cerise sur le gâteau, la documentation du projet est très complète, ce qui vous permet de monter et diriger le robot en moins de trois heures. Tous les détails du projet se trouvent ici.