En observant le terrain pour repérer des dangers, ce robot Raspberry Pi 4 sophistiqué pourrait sauver des vies humaines, comme l’a expliqué le maker Aviv à Rosie Hattersley...
Imaginez un robot capable de traverser les sables impitoyables du désert dans l’obscurité de la nuit, sur des distances de plusieurs kilomètres, et de se poster à des points d’arrêt pour surveiller les abords.
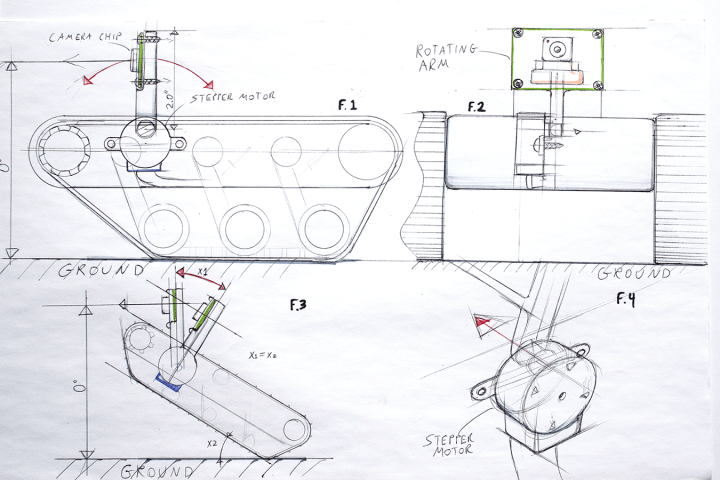
Lors de ces arrêts, il recueillerait des vidéos à l’aide d’une caméra frontale à zoom contrôlable et équipée de LED infrarouges invisibles à l’œil nu, mais allumées pour assurer la visibilité nocturne. Ensuite ce robot transmettrait les données vidéo à distance par une connexion sans fil chiffrée. Les dangers éventuels étant repérés, les soldats ou les explorateurs seraient informés de la possibilité de poursuivre en toute sécurité, ce qui permettrait de sauver des vies, mais aussi de gagner du temps et de réduire les coûts. C’est le projet sur lequel Aviv Butvinik, ingénieur et passionné de robotique, travaille depuis deux ans. En décembre, il a dévoilé la deuxième version de son robot de surveillance Desert Eye dans une vidéo YouTube qui montre sa capacité à s’adapter à des environnements difficiles et à des tempêtes de sable : magpi.cc/deserteyeyt.
Desert Eye est une magnifique mise en œuvre du Raspberry Pi 4, qu’Aviv a choisi pour ses capacités de traitement vidéo – « un élément essentiel pour ce robot » – mais aussi pour la maîtrise des mouvements et des communications. Outre les caméras, le Raspberry Pi 4 pilote les deux principaux moteurs à courant continu, un moteur pas à pas pour que la caméra pivote tout en étant stabilisée, le système GPS et la connectivité sans fil, ainsi qu’un capteur à trois axes et un ventilateur. Aviv part d’une « vision globale » des capacités de ses robots et conçoit les grandes lignes de leur fonctionnement.
Une vision globale du projet
Aviv a bénéficié d’un encouragement scolaire précoce qui fait rêver, puisqu’il a pu construire, à l’école primaire, des modèles réduits de fusées, des bateaux en mousse et des voitures motorisées en balsa avec son professeur de sciences. Ces années lui ont inculqué l’amour de la science. Le père d’Aviv lui a suggéré de passer un diplôme de dessin industriel au sein de l’université locale. Il y a finalement trouvé sa voie en proposant un projet d’ingénierie qui lui a valu la première place lors du symposium « Design for Safety ». Fort de ce succès, Aviv a obtenu un poste d’ingénieur mécanique et de dessinateur industriel pour créer des produits de sécurité automobile. Il explique que les problématiques et les solutions auxquelles il est confronté l’amènent à réfléchir « aux forces physiques, à l’ingénierie électrique et à la cinématique liées aux projets ».
La passion d’Aviv pour la robotique l’a poussé à concevoir lui-même presque tous les éléments de Desert Eye, notamment la dynamique de la suspension, qu’il a reprise du projet initial pour la version actuelle. Dans un monde idéal, il aurait tout conçu par lui-même (fixations, moteurs), voire sa propre version du Raspberry Pi 4. Aviv a cependant acheté ses composants auprès de différentes sources en ligne et a fait appel à un atelier d’impression 3D. Son meilleur conseil est d’utiliser le logiciel libre de commande de robot VIAM (viam.com), qu’il apprécie pour la facilité d’utilisation de la plateforme en ligne, mais aussi parce que le Raspberry Pi peut être flashé avec une version Lite du système d’exploitation pour le serveur VIAM, ce qui augmente sa vitesse de traitement. « L’équipe de VIAM a passé de nombreuses heures à m’aider à mettre au point la programmation de Desert Eye et j’espère pouvoir retravailler avec eux à l’avenir sur d’autres projets avancés de ce robot ».
Si Aviv était convaincu que le Raspberry Pi 4 était suffisamment puissant pour traiter les séquences vidéo capturées par son robot de surveillance, les LED infrarouges situées de part et d’autre du module de la caméra avaient tendance à assombrir les séquences. Une solution simple, mais efficace a consisté à les éloigner de la caméra et à les orienter de façon à ce que les faisceaux lumineux soient plus étroits et éclairent à 30 cm en avant du robot. Le Desert Eye 2.0 repéré lors de manœuvres en pleine nature.Cycles d’améliorations
Pour l’essentiel, les problématiques résultant de la conception de Desert Eye sont liées à la locomotion. La première version du robot était équipée d’une chenille extrêmement complexe et d’un système à double pignon qui faisait avancer le véhicule. « Ce système ressemblait à la suspension d’un char classique et fonctionnait de manière similaire », explique Aviv, mais les courroies tombaient parfois de leurs pignons du fait des vibrations de la route. Aviv les a remplacées par une chenille flexible imprimée en 3D, plus légère, fabriquée à partir d’un élastique qui peut tolérer des degrés de vibration et de désalignement beaucoup plus élevés que les chaînes.
Aviv a également constaté que lorsque le robot démarrait, il y avait « une énorme baisse de tension de la chenille (jeu supplémentaire), car les dispositifs basculants se déplaçaient tous vers l’intérieur ». Il a remédié à ce problème en ajoutant un deuxième bras au dispositif basculant arrière pour compenser la perte de tension.