Twisted Fields a développé un pilote de moteur BLDC à deux canaux sur la base d'un Raspberry Pi RP2040. Le logiciel et le matériel sont open source.
La commande de moteurs, entre autres celle de moteurs sans balais en courant continu (BLDC) a déjà été abordé dans Elektor.
Sur la base d'un Raspberry Pi, Twisted Fields a créé un pilote de moteur BLDC à deux canaux pour son robot agricole de précision. Robot agricole de précision Acorn (source: https://github.com/Twisted-Fields/acorn-precision-farming-rover/raw/main/docs/acorn.jpeg)
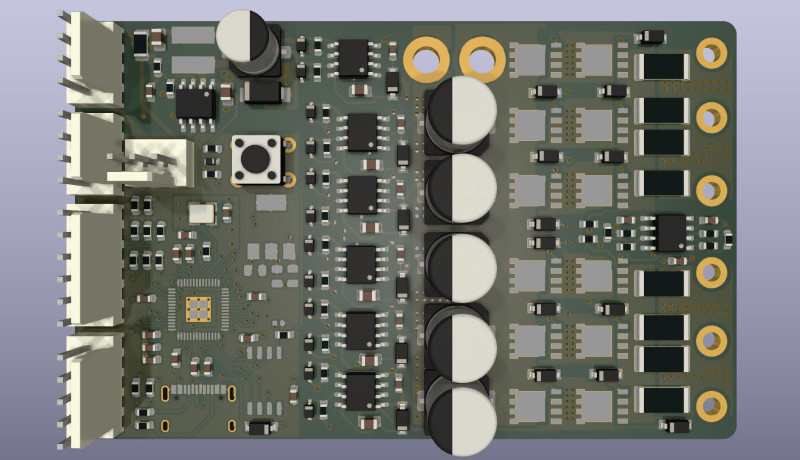
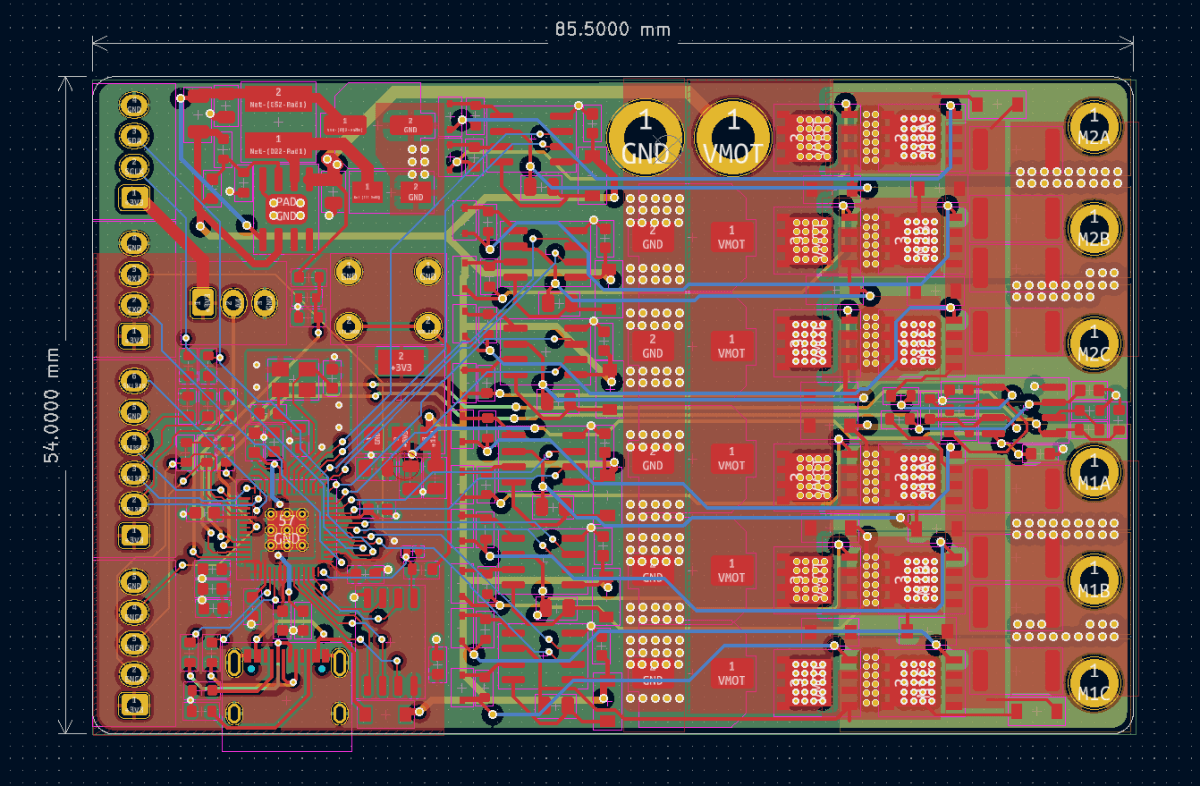
Ici, c'est un Raspberry Pi RP2040 qui est au cœur du système alors que les pilotes BLDC sont traditionnellement à base de STM32. Le projet complet peut être téléchargé depuis la page Github de Twisted Fields. La mise en page et l'implantation ont été créés avec Kicad, il est ainsi facile pour les intéressés de parcourir le projet. Conception du circuit imprimé avec Kicad (Source: https://github.com/Twisted-Fields/rp2040-motor-controller/raw/main/docs/pcb.png)
Par contre, ceux qui espèrent une solution de commande de moteurs BLDC « clés en main » devront s'armer de patience. Alors que la partie matérielle est présente, il y a des lacunes dans le logiciel. Cela signifie également que la partie matérielle peut encore être optimisée. Les bonnes volontés et les aides à l'optimisation pour ce projet seront certainement les bienvenues !